- 您现在的位置:买卖IC网 > Sheet目录342 > MCBSTM32EXL (Keil)BOARD EVALUATION FOR STM32F103ZE
�� �
�
�General-purpose� timer� (TIMx)�
�RM0008�
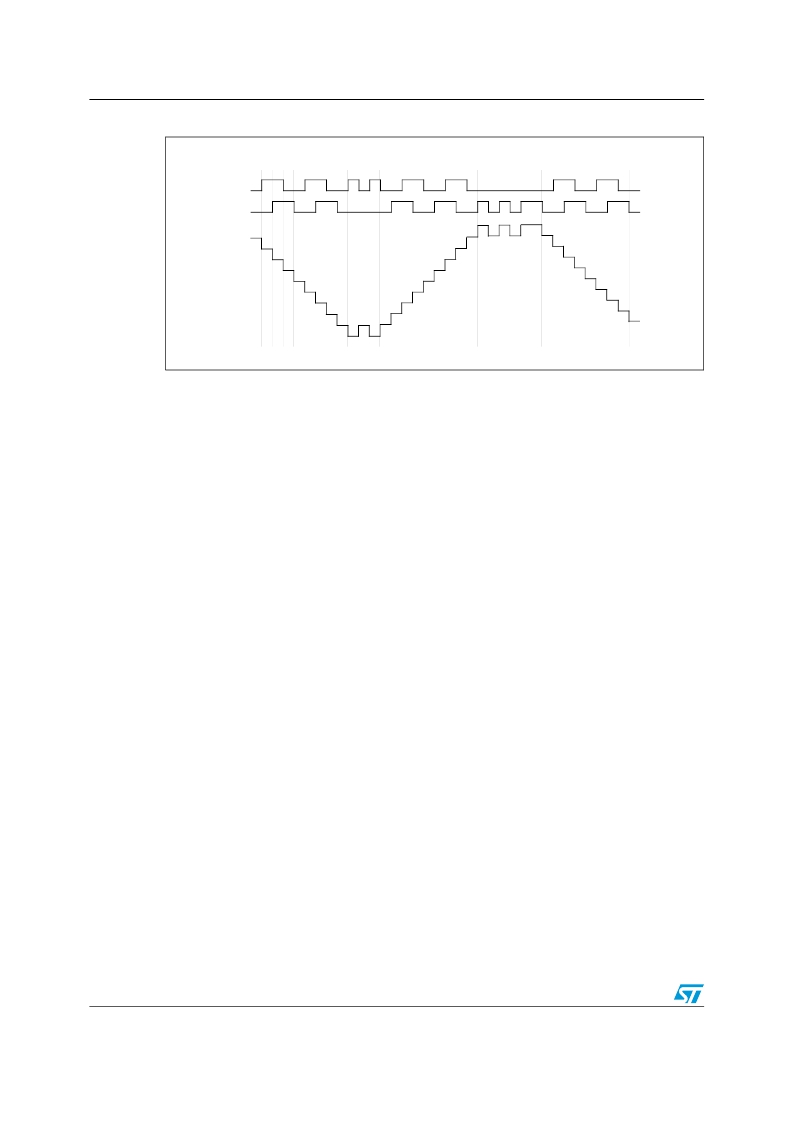
�Figure� 134.� Example� of� encoder� interface� mode� with� IC1FP1� polarity� inverted.�
�forward�
�jitter�
�backward�
�jitter�
�forward�
�TI1�
�TI2�
�Counter�
�down�
�up�
�down�
�The� timer,� when� configured� in� Encoder� Interface� mode� provides� information� on� the� sensor’s�
�current� position.� You� can� obtain� dynamic� information� (speed,� acceleration,� deceleration)� by�
�measuring� the� period� between� two� encoder� events� using� a� second� timer� configured� in�
�capture� mode.� The� output� of� the� encoder� which� indicates� the� mechanical� zero� can� be� used�
�for� this� purpose.� Depending� on� the� time� between� two� events,� the� counter� can� also� be� read�
�at� regular� times.� You� can� do� this� by� latching� the� counter� value� into� a� third� input� capture�
�register� if� available� (then� the� capture� signal� must� be� periodic� and� can� be� generated� by�
�another� timer).� when� available,� it� is� also� possible� to� read� its� value� through� a� DMA� request�
�generated� by� a� Real-Time� clock.�
�14.3.13�
�14.3.14�
�Timer� input� XOR� function�
�The� TI1S� bit� in� the� TIM1_CR2� register,� allows� the� input� filter� of� channel� 1� to� be� connected� to�
�the� output� of� a� XOR� gate,� combining� the� three� input� pins� TIMx_CH1� to� TIMx_CH3.�
�The� XOR� output� can� be� used� with� all� the� timer� input� functions� such� as� trigger� or� input�
�capture.�
�An� example� of� this� feature� used� to� interface� Hall� sensors� is� given� in� Section� 13.3.18� on� page�
��Timers� and� external� trigger� synchronization�
�The� TIMx� Timers� can� be� synchronized� with� an� external� trigger� in� several� modes:� Reset�
�mode,� Gated� mode� and� Trigger� mode.�
�Slave� mode:� Reset� mode�
�The� counter� and� its� prescaler� can� be� reinitialized� in� response� to� an� event� on� a� trigger� input.�
�Moreover,� if� the� URS� bit� from� the� TIMx_CR1� register� is� low,� an� update� event� UEV� is�
�generated.� Then� all� the� preloaded� registers� (TIMx_ARR,� TIMx_CCRx)� are� updated.�
�In� the� following� example,� the� upcounter� is� cleared� in� response� to� a� rising� edge� on� TI1� input:�
�346/995�
�●�
�Configure� the� channel� 1� to� detect� rising� edges� on� TI1.� Configure� the� input� filter� duration�
�(in� this� example,� we� don’t� need� any� filter,� so� we� keep� IC1F=0000).� The� capture�
�prescaler� is� not� used� for� triggering,� so� you� don’t� need� to� configure� it.� The� CC1S� bits�
�select� the� input� capture� source� only,� CC1S� =� 01� in� the� TIMx_CCMR1� register.� Write�
�CC1P=0� in� TIMx_CCER� register� to� validate� the� polarity� (and� detect� rising� edges� only).�
�Doc� ID� 13902� Rev� 9�
�发布紧急采购,3分钟左右您将得到回复。
相关PDF资料
MCBTMPM330
BOARD EVAL TOSHIBA TMPM330 SER
MCIMX25WPDKJ
KIT DEVELOPMENT WINCE IMX25
MCIMX53-START-R
KIT DEVELOPMENT I.MX53
MCM69C432TQ20
IC CAM 1MB 50MHZ 100LQFP
MCP1401T-E/OT
IC MOSFET DRVR INV 500MA SOT23-5
MCP1403T-E/MF
IC MOSFET DRIVER 4.5A DUAL 8DFN
MCP1406-E/SN
IC MOSFET DVR 6A 8SOIC
MCP14628T-E/MF
IC MOSFET DVR 2A SYNC BUCK 8-DFN
相关代理商/技术参数
MCBSTM32EXLU
功能描述:开发板和工具包 - ARM EVAL BOARD + ULINK2 FOR STM32F103ZG
RoHS:否 制造商:Arduino 产品:Development Boards 工具用于评估:ATSAM3X8EA-AU 核心:ARM Cortex M3 接口类型:DAC, ICSP, JTAG, UART, USB 工作电源电压:3.3 V
MCBSTM32EXLU-ED
制造商:ARM Ltd 功能描述:KEIL STM STM32EXL EVAL BOARD
MCBSTM32EXLUME
功能描述:开发板和工具包 - ARM EVAL BOARD + ULINKME FOR STM32F103ZG
RoHS:否 制造商:Arduino 产品:Development Boards 工具用于评估:ATSAM3X8EA-AU 核心:ARM Cortex M3 接口类型:DAC, ICSP, JTAG, UART, USB 工作电源电压:3.3 V
MCBSTM32F200
功能描述:开发板和工具包 - ARM EVAL BOARD FOR STM STM32F207IG
RoHS:否 制造商:Arduino 产品:Development Boards 工具用于评估:ATSAM3X8EA-AU 核心:ARM Cortex M3 接口类型:DAC, ICSP, JTAG, UART, USB 工作电源电压:3.3 V
MCBSTM32F200U
功能描述:开发板和工具包 - ARM EVAL BOARD FOR STM STM32F207IG + ULINK2
RoHS:否 制造商:Arduino 产品:Development Boards 工具用于评估:ATSAM3X8EA-AU 核心:ARM Cortex M3 接口类型:DAC, ICSP, JTAG, UART, USB 工作电源电压:3.3 V
MCBSTM32F200UME
功能描述:开发板和工具包 - ARM EVAL BOARD FOR STM STM32F207IG ULINK-ME
RoHS:否 制造商:Arduino 产品:Development Boards 工具用于评估:ATSAM3X8EA-AU 核心:ARM Cortex M3 接口类型:DAC, ICSP, JTAG, UART, USB 工作电源电压:3.3 V
MCBSTM32F200UME-ED
制造商:ARM Ltd 功能描述:KEIL STM32F207IG EVAL BOARD
MCBSTM32F400
功能描述:开发板和工具包 - ARM EVAL BOARD FOR STM STM32F407IG
RoHS:否 制造商:Arduino 产品:Development Boards 工具用于评估:ATSAM3X8EA-AU 核心:ARM Cortex M3 接口类型:DAC, ICSP, JTAG, UART, USB 工作电源电压:3.3 V